Archive
Robot stories
Every summer before school was over, I was assigned a list of books to read. Mostly nonfiction and historical fiction, but in fourth grade there that was that first science fiction book. I often remember how that book made me feel, and marvel at the impact that it had in my life. I had read some science fiction before—Well’s Time Traveller and War of the Worlds—but this was different. This was a book with witty and thought-provoking short stories by Isaac Asimov. Each of them delivered drama, comedy, mystery and a surprise ending in about ten pages. And they had robots. And those robots had personalities, in spite of their very simple programming: The Three Laws of Robotics.
- A robot may not injure a human being or, through inaction, allow a human being to come to harm.
- A robot must obey the orders given to it by human beings, except where such orders would conflict with the First Law.
- A robot must protect its own existence as long as such protection does not conflict with the First or Second Law.
Back in the 1980s, robotics—understood as autonomous mechanical thinking—was no more than a dream. A wonderful dream that fueled many children’s imaginations and probably shaped the career choices of some. I know in my case it did.
Fast forward some thirty-odd years, when I met Astro: one of three research robots manufactured by the French company Aldebaran. This NAO robot found its way into the computer science classroom of Tom Simpson in Heathwood Hall Episcopal School, and quickly learned to navigate mazes, recognize some student’s faces and names, and even dance the Macarena! It did so with effortless coding: a basic command of the computer language python, and some idea of object oriented programming.
I could not let this opportunity pass. I created a small undergraduate team with Danielle Talley from USC (a brilliant sophomore in computer engineering, with a minor in music), and two math majors from Morris College: my Geometry expert Fabian Maple, and a McGyver-style problem solver, Wesley Alexander. Wesley and Fabian are supported by a Department of Energy-Environmental Management grant to Morris College, which funds their summer research experience at USC. Danielle is funded by the National Science Foundation through the Louis Stokes South Carolina-Alliance for Minority Participation (LS-SCAMP).
They spent the best of their first week on this project completing a basic programming course online. At the same time, the four of us reviewed some of the mathematical tools needed to teach Astro new tricks: basic algebra and trigonometry, basic geometry, and basic calculus and statistics. The emphasis—I need to point out in case you missed it—is in the word basic.

Talk the talk
The psychologist seated herself and watched Herbie narrowly as he took a chair at the other side of the table and went through the three books systematically.
At the end of half an hour, he put them down, “Of course, I know why you brought these.”
The corner of Dr. Calvin’s lip twitched, “I was afraid you would. It’s difficult to work with you, Herbie. You’re always a step ahead of me.”
“It’s the same with these books, you know, as with the others. They just don’t interest me. There’s nothing to your textbooks. Your science is just a mass of collected data plastered together by makeshift theory — and all so incredibly simple, that it’s scarcely worth bothering about.”
“It’s your fiction that interests me. Your studies of the interplay of human motives and emotions” – his mighty hand gestured vaguely as he sought the proper words.
Liar!
— Isaac Asimov
Astro can understand what I say, and maintain conversations with me. He has four microphones for voice recognition and sound localization, and two speakers for text-to-speech synthesis. But he sometimes gets confused: I say “acute”, and he understands “abide,” for example. This might sound frustrating by all standards. But mathematicians can’t be judged by any reasonable standard. Far from seeing this as a shortcoming, my team used as motivation the mechanics behind his speech recognition functionality, and they wrote some code to turn him into an expert Mastermind player.
Wait, what? How are these two things possibly connected?
Since Astro’s hearing is far from perfect, when he hears a word which is not clear, he gathers a short list of possible candidates. He then chooses the most likely guess based upon different considerations—using clues from context, for example. Based on similar strategies, he can be taught to be a perfect player of 5-letter-word Mastermind: Pick any five-letter word in the English language. Any word, provided it has no repeated letters. Astro chooses one random word as his first guess, and requests a score like in Mastermind.
To illustrate this process, I will show you how the game went when I chose Fabian’s favorite word: “acute.”
Astro: Is it firth?
Me : NO
Astro: How many letters of my guess are in your word, in the right position?
How many letters of my guess are in your word, in the wrong position?
Me : 1, 0
Astro: Is it foams?
Me : NO
Astro: How many letters of my guess are in your word, in the right position?
How many letters of my guess are in your word, in the wrong position?
Me : 0, 1
Astro: Is it junta?
Me : NO
Astro: How many letters of my guess are in your word, in the right position?
How many letters of my guess are in your word, in the wrong position?
Me : 1, 2
Astro: Is it acute?
Me : YES
Astro: Wonderful, I found it in 4 attempts!
I don’t want to get too technical here, but will mention some of the ideas. The main algorithm is based on techniques of numerical root finding and solving nonlinear equations — nothing complex: high-school level bracketing by bisection, or Newton’s method. To design better winning strategies, my team exploits the benefits of randomness. The analysis of this part is done with basic probability and statistics.
Walk the walk
Donovan’s pencil pointed nervously. “The red cross is the selenium pool. You marked it yourself.”
“Which one is it?” interrupted Powell. “There were three that MacDougal located for us before he left.”
“I sent Speedy to the nearest, naturally; seventeen miles away. But what difference does that make?” There was tension in his voice. “There are penciled dots that mark Speedy’s position.”
And for the first time Powell’s artificial aplomb was shaken and his hands shot forward for the man.
“Are you serious? This is impossible.”
“There it is,” growled Donovan.
The little dots that marked the position formed a rough circle about the red cross of the selenium pool. And Powell’s fingers went to his brown mustache, the unfailing signal of anxiety.
Donovan added: “In the two hours I checked on him, he circled that damned pool four times. It seems likely to me that he’ll keep that up forever. Do you realize the position we’re in?”
Runaround
— Isaac Asimov
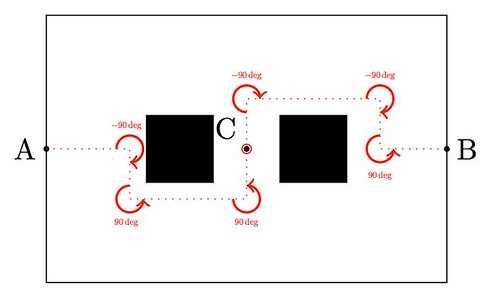
Astro moves around too. It does so thanks to a sophisticated system combining one accelerometer, one gyrometer and four ultrasonic sensors that provide him with stability and positioning within space. He also enjoys eight force-sensing resistors and two bumpers. And that is only for his legs! He can move his arms, bend his elbows, open and close his hands, or move his torso and neck (up to 25 degrees of freedom for the combination of all possible joints). Out of the box, and without much effort, he can be coded to walk around, although in a mechanical way: He moves forward a few feet, stops, rotates in place or steps to a side, etc. A very naïve way to go from A to B retrieving an object at C, could be easily coded in this fashion as the diagram shows:
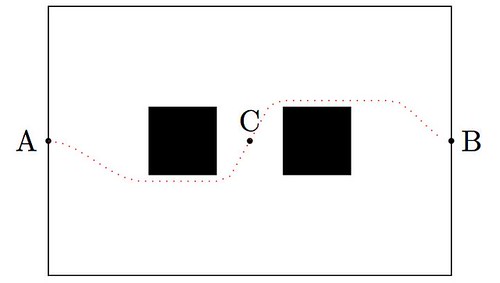
Fabian and Wesley devised a different way to code Astro taking full advantage of his inertial measurement unit. This will allow him to move around smoothly, almost like a human would. The key to their success? Polynomial interpolation and plane geometry. For advanced solutions, they need to learn about splines, curvature, and optimization. Nothing they can’t handle.
Sing me a song
He said he could manage three hours and Mortenson said that would be perfect when I gave him the news. We picked a night when she was going to be singing Bach or Handel or one of those old piano-bangers, and was going to have a long and impressive solo.
Mortenson went to the church that night and, of course, I went too. I felt responsible for what was going to happen and I thought I had better oversee the situation.
Mortenson said, gloomily, “I attended the rehearsals. She was just singing the same way she always did; you know, as though she had a tail and someone was stepping on it.”
One Night of Song
— Isaac Asimov
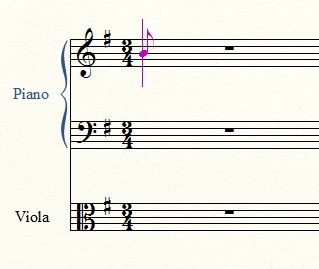
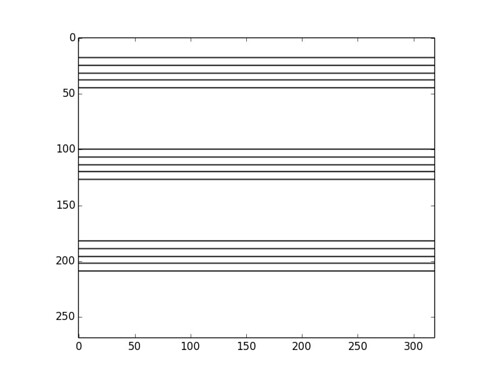
Astro has excellent eyesight and understanding of the world around him. He is equipped with two HD cameras, and a bunch of computer vision algorithms, including facial and shape recognition. Danielle’s dream is to have him read from a music sheet and sing or play the song in a toy piano. She is very close to completing this project: Astro is able now to identify partitures, and extract from them the location of the pentagrams. Danielle is currently working on identifying the notes and the clefs. This is one of her test images, and the result of one of her early experiments:
|
|
Most of the techniques Danielle is using are accessible to any student with a decent command of vector calculus, and enough scientific maturity. The extraction of pentagrams and the different notes on them, for example, is performed with the Hough transform. This is a fancy term for an algorithm that basically searches for straight lines and circles by solving an optimization problem in two or three variables.
The only thing left is an actual performance. Danielle will be leading Fabian and Wes, and with the assistance of Mr. Simpson’s awesome students Erica and Robert, Astro will hopefully learn to physically approach the piano, choose the right keys, and play them in the correct order and speed. Talent show, anyone?
Advanced Problem #18
Another fun problem, as requested by Qinfeng Li in MA598R: Measure Theory
Let
so that
too.
Show that
and

I got this problem by picking some strictly positive value 

Let us examine now the factors 



We have thus proven that 


Some results related to the Feuerbach Point
Given a triangle 

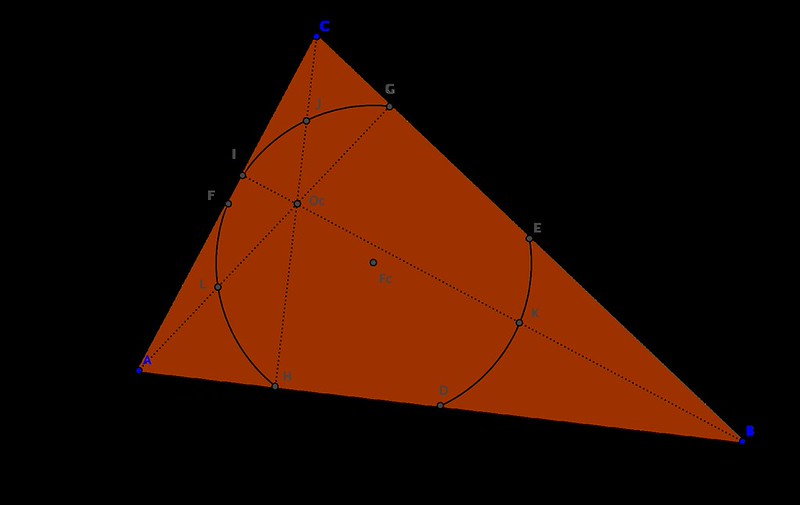
- It also goes through the feet of the heights, points
- If
denotes the orthocenter of the triangle, then the Feuerbach circle also goes through the midpoints of the segments
For this reason, the Feuerbach circle is also called the nine-point circle.
- The center of the Feuerbach circle is the midpoint between the orthocenter and circumcenter of the triangle.
- The area of the circumcircle is precisely four times the area of the Feuerbach circle.

Most of these results are easily shown with sympy without the need to resort to Gröbner bases or Ritt-Wu techniques. As usual, we realize that the properties are independent of rotation, translation or dilation, and so we may assume that the vertices of the triangle are 


>>> import sympy
>>> from sympy import *
>>> A=Point(0,0)
>>> B=Point(1,0)
>>> r,s=var('r,s')
>>> C=Point(r,s)
>>> D=Segment(A,B).midpoint
>>> E=Segment(B,C).midpoint
>>> F=Segment(A,C).midpoint
>>> simplify(Triangle(A,B,C).circumcircle.area/Triangle(D,E,F).circumcircle.area)
4
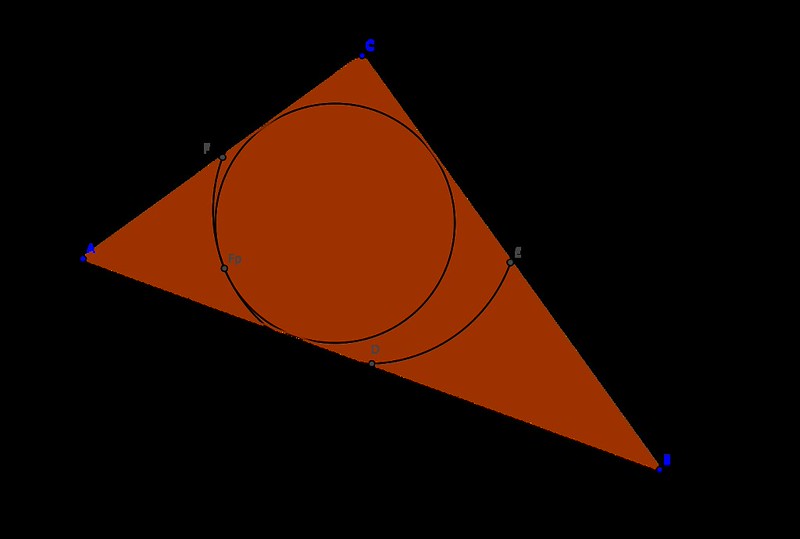
But probably the most amazing property of the nine-point circle, is the fact that it is tangent to the incircle of the triangle. With exception of the case of equilateral triangles, both circles intersect only at one point: the so-called Feuerbach point.
An Automatic Geometric Proof
We are familiar with that result that states that, on any given triangle, the circumcenter, centroid and orthocenter are always collinear. I would like to illustrate how to use Gröbner bases theory to prove that the incenter also belongs in the previous line, provided the triangle is isosceles.
We start, as usual, indicating that this property is independent of shifts, rotations or dilations, and therefore we may assume that the isosceles triangle has one vertex at 



![R=\mathbb{R}[s,x_1,x_2,x_3,y_1,y_2,y_3,z],](https://s0.wp.com/latex.php?latex=R%3D%5Cmathbb%7BR%7D%5Bs%2Cx_1%2Cx_2%2Cx_3%2Cy_1%2Cy_2%2Cy_3%2Cz%5D%2C&bg=ffffff&fg=555555&s=0&c=20201002)







We may obtain all six conditions by using sympy, as follows:
>>> import sympy
>>> from sympy import *
>>> A=Point(0,0)
>>> B=Point(1,0)
>>> s=symbols("s",real=True,positive=True)
>>> C=Point(1/2.,s)
>>> T=Triangle(A,B,C)
>>> T.circumcenter
Point(1/2, (4*s**2 - 1)/(8*s))
>>> T.centroid
Point(1/2, s/3)
>>> T.incenter
Point(1/2, s/(sqrt(4*s**2 + 1) + 1))
This translates into the following polynomials
 (for circumcenter)
(for circumcenter)  (for centroid)
(for centroid)  (for incenter)
(for incenter)The hypothesis polynomial comes simply from asking whether the slope of the line through two of those centers is the same as the slope of the line through another choice of two centers; we could use then, for example, 
![I=(h_1, \dotsc, h_6, 1-zg) \subset \mathbb{R}[s,x_1,x_2,x_3,y_1,y_2,y_3,z].](https://s0.wp.com/latex.php?latex=I%3D%28h_1%2C+%5Cdotsc%2C+h_6%2C+1-zg%29+%5Csubset+%5Cmathbb%7BR%7D%5Bs%2Cx_1%2Cx_2%2Cx_3%2Cy_1%2Cy_2%2Cy_3%2Cz%5D.&bg=ffffff&fg=555555&s=0&c=20201002)
sage: R.<s,x1,x2,x3,y1,y2,y3,z>=PolynomialRing(QQ,8,order='lex') sage: h=[2*x1-1,8*r*y1-4*r**2+1,2*x2-1,3*y2-r,2*x3-1,(4*r*y3+1)**2-4*r**2-1] sage: g=(x2-x1)*(y3-y1)-(x3-x1)*(y2-y1) sage: I=R.ideal(1-z*g,*h) sage: I.groebner_basis() [1]
This proves the result.
Sympy should suffice
I have just received a copy of Instant SymPy Starter, by Ronan Lamy—a no-nonsense guide to the main properties of SymPy, the Python library for symbolic mathematics. This short monograph packs everything you should need, with neat examples included, in about 50 pages. Well-worth its money.
To celebrate, I would like to pose a few coding challenges on the use of this library, based on a fun geometric puzzle from cut-the-knot: Rhombus in Circles
Segments
and
are equal. Lines
and
intersect at
Form four circumcircles:
Prove that the circumcenters
form a rhombus, with


Note that if this construction works, it must do so independently of translations, rotations and dilations. We may then assume that 



import sympy
from sympy import *
# Point definitions
M=Point(0,0)
A=Point(2,0)
B=Point(1,0)
a,theta=symbols('a,theta',real=True,positive=True)
C=Point((a+1)*cos(theta),(a+1)*sin(theta))
D=Point(a*cos(theta),a*sin(theta))
#Circumcenters
E=Triangle(A,C,M).circumcenter
F=Triangle(A,D,M).circumcenter
G=Triangle(B,D,M).circumcenter
H=Triangle(B,C,M).circumcenter
Finding that the alternate angles are equal in the quadrilateral 
In [11]: P=Polygon(E,F,G,H) In [12]: P.angles[E]==P.angles[G] Out[12]: True In [13]: P.angles[F]==P.angles[H] Out[13]: True
To prove it a rhombus, the two sides that coincide on each angle must be equal. This presents us with the first challenge: Note for example that if we naively ask SymPy whether the triangle 
In [14]: Triangle(E,F,G).is_equilateral() Out[14]: False In [15]: F.distance(E) Out[15]: Abs((a/2 - cos(theta))/sin(theta) - (a - 2*cos(theta) + 1)/(2*sin(theta))) In [16]: F.distance(G) Out[16]: sqrt(((a/2 - cos(theta))/sin(theta) - (a - cos(theta))/(2*sin(theta)))**2 + 1/4)
Part of the reason is that we have not indicated anywhere that the parameter theta is to be strictly bounded above by 
In [17]: trigsimp(F.distance(E)-F.distance(G),deep=True)==0 Out[17]: False
Finding that 
How would the reader resolve this situation?

A nice application of Fatou’s Lemma
Let me show you an exciting technique to prove some convergence statements using exclusively functional inequalities and Fatou’s Lemma. The following are two classic problems solved this way. Enjoy!
Exercise 1 Let
be a measurable space and suppose
is a sequence of measurable functions in
that converge almost everywhere to a function
and such that the sequence of norms
converges to
. Prove that the sequence of integrals
converges to the integral
for every measurable set
.
Proof: Note first that

Set then 

which implies

It must then be 

Exercise 2 Let
. Suppose that
is a sequence of measurable functions in
whose norms are uniformly bounded in
and which converge almost everywhere to a function
. Prove that the sequence
converges to
for all
where
is the conjugate exponent of
.
Proof: The proof is very similar to the previous problem. We start by noticing that under the hypotheses of the problem,
If we prove that 
We will achieve this by using the convexity of 

hence,

Set then 

Trigonometry
I have just realized that I haven’t posted a good puzzle here in a long time, so here it goes one on Trigonometry, that the average student of Calculus should be able to tackle: you can use anything you think it could help: derivatives, symmetry, periodicity, integration, summation, go to several variables, differential equations, etc
Prove that, for all real values
it is
or, in a more compact notation,


What if?

Sara, Spencer and Cam (left to right) discussing their projects in office hour
“What if?” is a truly powerful question. It is the question that separates the child from the adult; the student from the professional. Average students will go through the motions of a course and ask themselves many times: “What is the point of all this?” On the other hand, the notable students on their way to excellence will ask themselves: “How can I profit from this?” It is these inquiring minds who make it at the end: they are a pleasure to work with, they have the drive and the passion to get the job done, enjoy the process, and they are more likely to give their future employers more of their time in pursue of solutions—not because there is monetary or status gain alone, but because their commitment is only matched with their skill and curiosity.
It is a thrill to witness your own students pose that “What if?” question to themselves, and take steps to accomplish that little dream with the knowledge obtained in class. This semester, I had been blessed with a group of extremely talented people in all my different teaching assignments—especially those in my course on elementary differential equations.
Blanco-Silva’s Books
Click on either image for more information


In the news:


 Math updates on arXiv.org
Math updates on arXiv.org
- On the image of the total power operation for Burnside rings
- A note on hidden classes in spinor classification
- Modularity of certain products of the Rogers-Ramanujan continued fraction
- Complex Analytic Structure of Stationary Flows of an Ideal Incompressible Fluid
- Learning the local density of states of a bilayer moir\'e material in one dimension
- Hypergeometric Distribution Revisited: Tail Inequalities, Confidence Bounds and Sample Sizes
- Positive formula for the product of conjugacy classes on the unitary group
- Neural Estimation Of Entropic Optimal Transport
- Some Homological Conjectures Over Idealization Rings
- On kernels of homological representations of mapping class groups
sagemath
- An error has occurred; the feed is probably down. Try again later.
